Zur Hauptseite Fokussiermotor Ergänzende Erläuterungen zum AVR
TalMic - Die Mikrocontroller-Steuerung für TAL2MSchon im Februar 2000, angespornt durch Armins Basteleien für das TAL2M, kam in mir auch der Wunsch hoch, das TAL ein wenig zu verbessern. Vor allen Dingen sollte es, wie beim Armin, erst einmal vom Stromnetz unabhängig werden. Weitere Features, wie Korrektur in DEK und die Möglichkeit einen Fokussiermotor zu betreiben, sollten von Anfang an berücksichtigt werden. Da ich schon einige Erfahrung mit Mikrocontrollern von Atmel gesammelt habe, fiel meine Wahl auch hierbei auf solch eine Mikrocontroller-Lösung. Dadurch könnte ich meinem Scope sogar eine serielle Schnittstelle verpassen. Dies ist ganz nützlich, wenn man alle Funktionen fernsteuern möchte.
Mein Lösungsansatz möchte ich hiermit vorstellen. Die erste große Bewährungsprobe meisterte die Schaltung mit Bravour am Abend der Mondfinsternis 09.01.2001. Da lief sie klaglos den ganzen Abend. So aber nun zur Vorstellung.
Bitte beachtet auch den Hinweis am Ende dieser Seite.
Als erstes möchte ich Euch den Schaltplan kurz zeigen
Da ich von Anfang an vorhatte, diese Schaltung als professionelle Platine fertigen zu lassen, arbeitete ich mit dem Platinenlayoutprogramm Eagle für Linux. Die Schaltung kann hier im SCH-Format heruntergeladen werden.
Nur soviel zur Schaltung. Links neben dem AVR-Controllers sieht man einen MAX233, dies ist ein Schnittstellenwandler, welcher mir die serielle Schnittstelle zur Verfügung stellt. Diese wurde schon während der SW-Entwicklung für Debug-Ausgaben genutzt. Die eigentliche Schaltung für die Steuerung des 50Hz-Motors besteht aus der Brückenschaltung mit den sechs Transistoren, welche direkt mittels zwei Ausgängen des Microcontrollers gesteuert wird. Den Deklinations- und Fokussiermotor werde ich jeweils mit einem Schrittmotor realisieren. Hierfür ist der ULN2803 zuständig. Dies ist ein 8-Fach Darlington Transistor Array. Dieses kann man direkt mit einem Ausgang des Controllers ansteuern und er besitzt genug Strombelastbarkeit um kleine Schrittmotoren direkt zu treiben. Weiterhin gibt es mehrere Steckerleisten, wo die einzelnen Gerätschaften angeschlossen werden. Ganz wichtig ist hierbei die Leiste, welche im Schaltplan mit "Tasten" benannt wurde. Dahinter verbirgt sich das abgesetzte Bedienteil der Steuerung. Den Schaltplan dazu, muß ich noch zeichnen, denn hierfür habe ich wieder auf die konventionelle Fädeltechnik zurückgegriffen. Nur so viel, in der abgesetzten Box befinden sich die Anschlüsse für die Tasten, die Anzeige (8-fach 5x7 Segment) und zwei Schieberegister für die Ansteuerung der Anzeige. In dem Schaltplan ist auch ein PCF8583 zu sehen. Dies ist eine Echtzeituhr mit I2C-Interface, diese ist aber noch nicht bestückt.
Die fertige Platine ist 100x62 mm groß. Somit passt sie wunderbar in das originale Gehäuse beim TAL. Natürlich muß man hierzu die Original-Elektronik rauswerfen. Hier mal ein Bild einer Leerplatine:
So sieht die Platine teilbestückt aus. Da ich im Moment gerade dran bin, die Mechanik für den Fokussiermotor zusammen zustellen, ist das Treiber-IC noch nicht bestückt. Oberhalb der ganzen Bauelemente sind die Steckerleisten recht schön zu sehen.

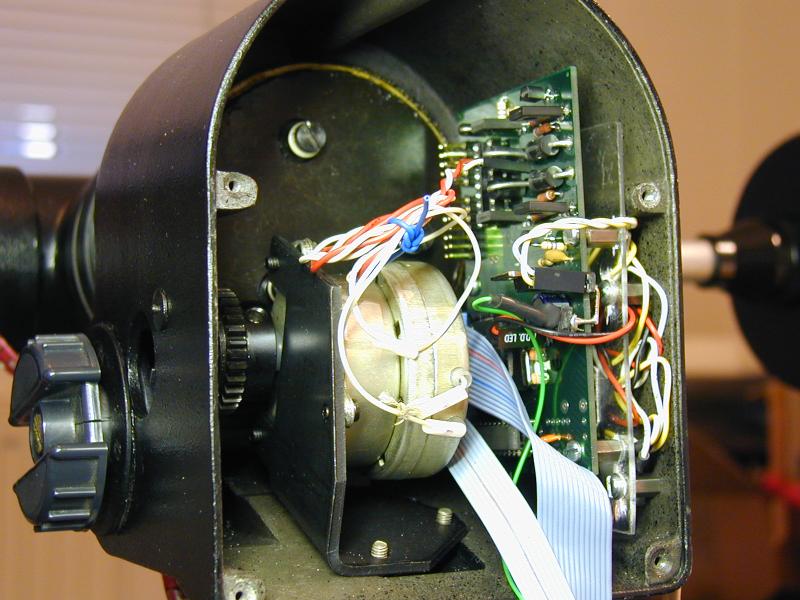
Nun ist die Platine in das Motorgehäuse eingebaut. Die Gehäuseausbrüche für die originale Elektronik werden weiterhin benutzt. Und zwar genauso, wie dies vorher war. Also in der Bohrung der LED, steckt wieder eine. Der Ein-/Ausschalter und die Stromzufuhr befinden sich in den entsprechenden Löchern.
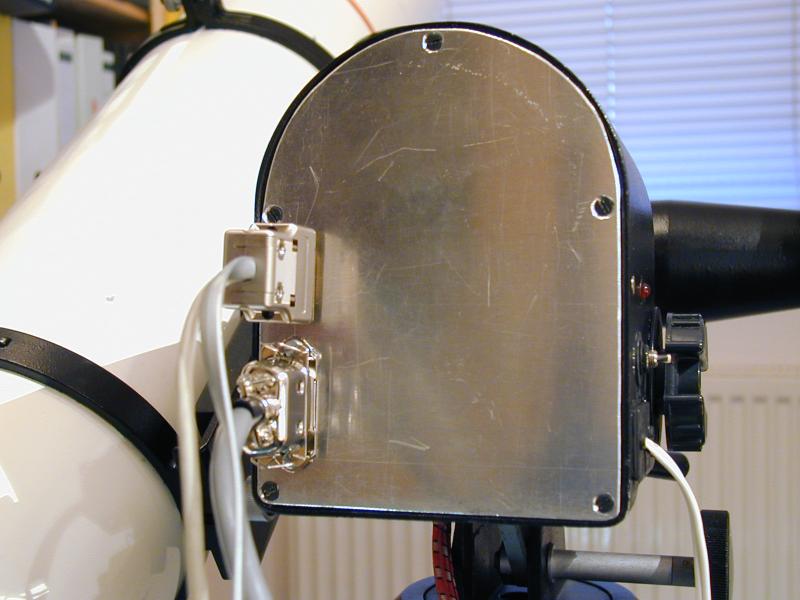
Da ich zu faul war, in die originale Rückwand die ganzen Löcher für die zusätzlich benötigten Anschlüsse zu bohren/feilen, habe ich mir eine aus 2 mm dickem Alublech gebaut. Denn Alu läßt sich ein wenig einfacher bearbeiten. Auf dem folgenden Bild sind erst zwei der 4 notwendigen Stecker zu sehen. Der untere ist der Anschluß für das Bedienteil. Der obere ist der Anschluß für die serielle Schnittstelle. In diesem 9-poligen Stecker ist auch der Anschluß für die Programmierung des Controllers untergebracht. Denn dieser läßt sich ganz einfach Incircuit programmieren
Als letztes bleibt jetzt nur noch ein Bild von dem Bedienteil zu zeigen:

Da die Ansteuerung für das Display noch nicht implementiert ist, gibt es da noch nichts zu sehen. Kommt erst noch in naher Zukunft. Zu den Tasten brauch ich wahrscheinlich auch nicht viel zu sagen. Nur soviel, die Tasten oberhalb des Displays sind für den Fokussiermotor vorgesehen.
So das wars, die kurze Vorstellung meiner Schaltung. Bei weitergehendem Interesse einfach eine Mail an mich.
Text geändert am 13.03.2001
Zu aller Letzt noch die Sprüche, ohne die es in unserem Rechtsstaat leider manchmal zu Missverständnissen kommt:Die von mir veröffenlichten Baupläne sind für private Nutzer frei nachbaubar. Eine kommerzielle Vermarktung von Geräten die auf diese Baupläne zurückzuführen sind, ist nicht gestattet.
Nachbau und Anwendung auf eigene Gefahr. Für die Funktion bzw. für eventuelle Schäden, die sich aufgrund von Nachbauten, der von mir veröffentlichen Baupläne ergeben, übernehme ich keinerlei Verantwortung..
Das hört sich schlimm an, ist aber halb so wild. Ich hab nur keine Lust mich für einen Schaden zu veranworten, nur weil jemand der von solchen Dingen gar keine Ahnung hat, einen Akku kurzschliesst und sich die Hütte oder sonstiges absengelt.
Zur Hauptseite